
 简体中文
简体中文 English
English

功能特性
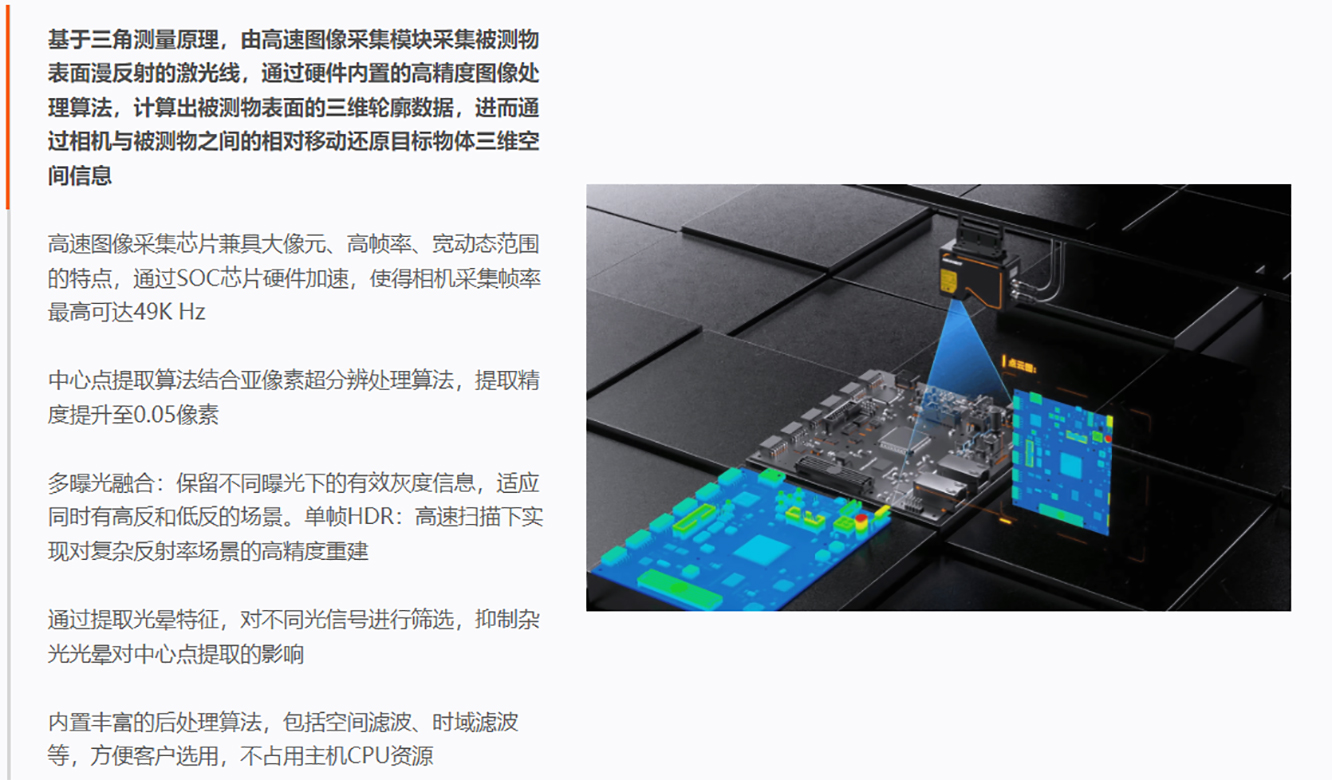
1、双图像传感器设计,消除视野盲区,抑制杂散光。
2、内置高精度3D算法,重复精度可达亚微米级。
3、采用高帧率图像芯片,扫描速率最高可达10 KHz。
4、支持多种曝光模式,动态范围更大。
5、采用图像融合算法技术,点云数据更完整。
6、支持多种滤波模式可选,点云数据更稳定。
订货型号
MV-DP2060-01D
*产品所涉数据可能因环境等因素而产生差异,本公司不承担由此产生的后果。

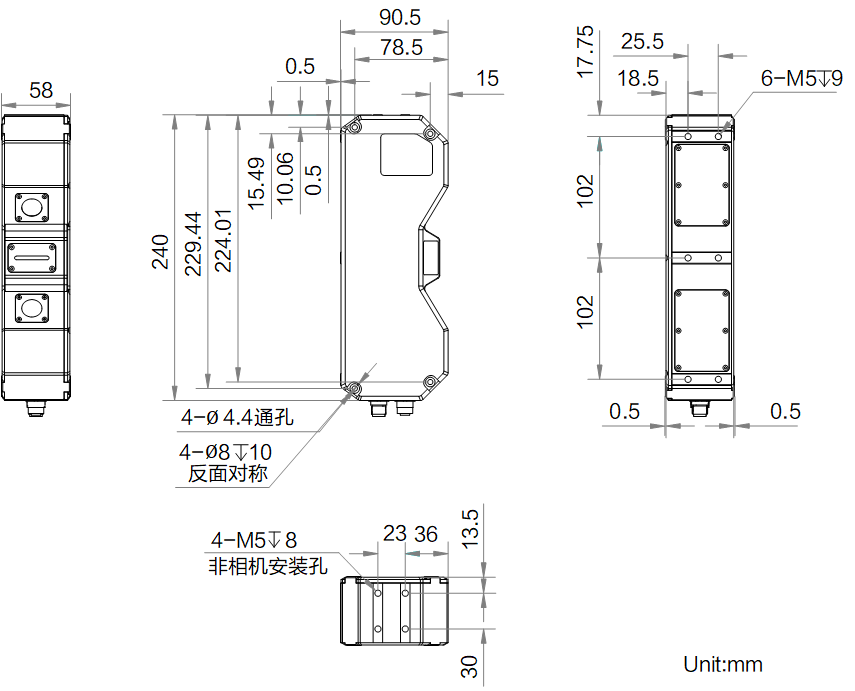
外形尺寸
详细参数
| 型号 | 型号 | MV-DP2060-01D |
| 名称 | 3D激光轮廓传感器 | |
| 性能 | 单轮廓点数 | 2048 |
| 参考距离 | 63.5 mm | |
| Z轴测量范围 | 26 mm | |
| X轴测量范围 | 26.5 mm@近端; 31 mm@参考距离; 35.5 mm@远端 | |
| 轮廓数据间隔 | 13.2 ~ 18.5 μm | |
| 扫描帧率 | 660 Hz(最大测量范围下),最高可达10 KHz(ROI模式下) | |
| 数据输出类型 | 轮廓数据、深度图、亮度图、线宽图 | |
| 触发模式 | 软触发、硬触发(单端、差分、差分编码器触发) | |
| Z轴分辨率 | 1.50 ~ 2.71 μm | |
| Z轴重复精度 | 0.49 μm@传感器在光学平台上测试标准量块的数据 | |
| Z轴线性度(±% of MR) | 0.008 | |
| 电气特性 | 数据接口 | Gigabit Ethernet(1000Mbit/s),兼容Fast Ethernet(100Mbit/s) |
| 数字I/O | 12-pin M12接口提供供电和I/O,3路差分信号输入(Line 0/3/6),1路差分信号输出(Line 1),1路RS-232 | |
| 供电 | 24 VDC | |
| 典型功耗 | 21 W@24 VDC | |
| 结构 | 外形尺寸 | 240 mm × 90.5 mm × 58 mm |
| 重量 | 约1447 g | |
| IP防护等级 | IP67 | |
| 温度 | 工作温度0 ~ 45°C,储藏温度-30 ~ 80°C | |
| 湿度 | 20%~85%RH无凝结 | |
| 激光性能 | 激光安全等级 | Class3R |
| 波长 | 405 nm | |
| 一般规范 | 软件 | 3DMVS、VM3D及其它第三方3D软件 |
| 操作系统 | Windows 7/10 32/64bits、Windows 11 64bits(8G内存,i5处理器) |



